-
1 in one transfer mode
Автоматика: за один цикл передачи (данных) -
2 mode
1) способ; метод; режим ( работы), мода2) форма; тип; вид3) форма колебаний, вид колебаний4) состояние•in shaft mode — при установке детали в центрах, при установке обрабатываемой детали в центрах (напр. токарного станка)
- 2D mode- 3D mode
- acceleration mode
- accept/reject mode
- adapt mode
- adaptive control mode
- anticipation mode
- approach mode
- automatic mode of operation
- automatic mode
- automatic skinning mode
- autoposition mode
- batch mode
- closed loop position mode
- CNC mode
- command mode
- compliant mode
- constant cutting speed mode
- constant speed mode
- continuous machine control mode
- continuous mode
- continuous path mode
- contouring mode
- control mode
- conversational mode
- creep mode
- cruise mode
- cubic mode
- dash mode
- deceleration mode
- decentralized mode
- dialog mode
- DNC communication mode
- DNC mode
- dual-range cutting speed mode
- dwell mode
- eigen mode
- emulation mode
- extreme mode
- failsafe mode
- failure mode
- feed-through mode
- flexural nth mode
- full program mode
- hierarchical mode
- horizontal mode
- idle mode
- interactive graphics mode
- interactive mode
- interrupt mode
- iteration mode
- jog mode
- joystick mode
- learn mode
- machining mode
- manual data input mode of operation
- manual mode of operation
- manual skinning mode
- minimally manned mode
- mirror image mode
- mode of inspection
- mode of operation
- mode of servicing
- mode of test
- mode of vibration
- natural mode
- NC mode
- off-line mode
- one-off mode
- one-step drilling mode
- open loop mode
- operating mode
- operation mode
- part manual mode
- pass-through mode
- peck-feed mode
- playback mode
- point-to-point path mode
- ptp path mode
- pulsed mode of laser
- pulsed mode
- question-and-answer mode
- rapid traverse mode
- read-in mode
- replay mode
- retract mode
- rotary mode
- rotation mode
- run mode
- sets-of-parts mode
- setup mode
- single block mode of operation
- single block mode
- single-cycle mode
- skip mode
- skip-feed drill mode
- snap mode
- solving mode
- square mode
- standalone mode
- step-feed drilling mode
- system mode
- tape auto mode
- tape mode
- teach mode
- teaching mode
- track/touch mode
- tracking mode
- translation mode
- translucent mode
- traverse mode
- unattended mode
- unmanned mode
- variable speed mode
- vertical mode
- vibration mode
- vibrational mode
- vibration-free mode
- virtual call mode
- zoom modeEnglish-Russian dictionary of mechanical engineering and automation > mode
-
3 unified messaging
- унифицированный обмен сообщениями
- объединенная система передачи и приема сообщений
- интегрированный обмен сообщениями
интегрированный обмен сообщениями
Метод совместной передачи сообщений различного вида (факс, электронная почта, аудио- и видеоданные). Сообщения хранятся в едином почтовом ящике пользователя и могут обрабатываться одинаковым образом. Все сообщения включаются в общий список и могут быть просмотрены или прослушаны за один цикл обращения пользователя к данной информации.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
объединенная система передачи и приема сообщений
Объединенная система передачи и приема сообщений в среде мобильной связи означает, что каждый пользователь должен при помощи мобильного телефона получать доступ ко всем форматам сообщений, включая голосовую почту, факсимильные, пейджинговые, короткие сообщения и электронную почту. В настоящее время сообщения приходят из огромного количества источников и имеют самый разный формат. Объединенная система позволит собрать все форматы сообщений и услуги под одной крышей, обеспечивая пользователя возможностью управлять данными и информационными ресурсами с максимальной выгодой.
[ http://www.morepc.ru/dict/]Тематики
EN
унифицированный обмен сообщениями
Метод передачи сообщений различного вида (факс, электронные письма и голосовые сообщения), позволяющий их обрабатывать одинаковым образом и хранить в едином почтовом ящике пользователя.
[Л.М.Невдяев. Мобильная связь 3-го поколения. Москва, 2000 г.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > unified messaging
-
4 transfer instruction
1. команда передачи управленияinstruction code — код команды; система команд; набор команд
do-nothing instruction — холостая команда; фиктивная команда
skeleton instruction — команда-заготовка; скелетная команда
2. команда на переходEnglish-Russian big polytechnic dictionary > transfer instruction
-
5 frame
- эквипотенциальная рама
- шпангоут судна
- цикл временного объединения цифровых сигналов электросвязи
- цикл временного объединения цифровых сигналов данных
- фрейм
- рамка
- рама кресла-коляски
- рама (в строительной механике)
- рама (в санном спорте, бобслее)
- рама
- оправа защитных очков
- наличник
- масса (при заземлении)
- коробка (в строительстве)
- конструкция
- каркас держателя пьезоэлектрического резонатора
- каркас (рама)
- каркас (в строительстве)
- каркас (в стоечных шкафах)
- кадрик
- кадр средства отображения информации
- кадр данных
- кадр (в информационных технологиях)
- кадр
кадр
Изображение, фрагмент видеосигнала, либо интервал времени, соответствующие однократному обходу растра развертывающим элементом, который начинается и заканчивается в одной и той же точке.
[ ГОСТ 21879-88]
кадр
Базовая единица телевизионного изображения. Последовательность кадров образует непрерывное ("живое") телевизионное изображение. Кадр образуется объединением телевизионных полей.
[ http://datasheet.do.am/forum/22-4-1]
кадр
Единичное полное изображение. В формате чересстрочной развертки 2:1 стандартов RS-170 и CCIR кадр составляется из двух раздельных полей с 262,5 или 312,5 строками, чередующихся с частотой 60 или 50 Гц, что позволяет формировать полный кадр с частотой 30 или 25 Гц. В видеокамерах с функцией прогрессивной развертки каждый кадр разворачивается построчно и не чередуется. В большинстве случаев частота кадров составляет также 30 и 25 Гц.
[ http://www.alltso.ru/publ/glossarij_setevoe_videonabljudenie_terminy/1-1-0-34]Тематики
- телевидение, радиовещание, видео
Обобщающие термины
EN
кадр
рамка
фрейм
Применительно к передаче данных, кадр — единица данных канального уровня (L2). В сетях Ethernet размер кадра обычно составляет от нескольких десятков байт до 1,5 Кбайт; некоторые устройства позволяют работать с кадрами размером до 9 Кбайт.
Элементы HTML, появившиеся в броузерах версий 3.0. Позволяют разделить страницу на несколько независимых окон и в каждом из них размещать свою собственную WEB-страничку. Возможна ссылка из одного окна в другое. Применяется в основном для организации постоянно находящихся на экране меню, в то время как в другом окне располагается непосредственно сама информация
[http://www.webxpert.ru/slovar.html].
Примеры сочетаний:
frame grabber - плата захвата и ввода изображения, проф. фреймграббер - устройство оцифровки и ввода в память компьютера изображений с устройства видеоввода (видеокамеры, видеоплеера)
frame rate - частота кадров видеоизображений.
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
кадр данных
кадр
Протокольный блок данных уровня звена данных
[ ГОСТ 24402-88]
[ ГОСТ 29099-91]
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Тематики
Синонимы
EN
кадр средства отображения информации
кадр
Сформированное изображение для одновременного отображения информации на экране средства отображения информации.
[ ГОСТ 27833-88]Тематики
Синонимы
EN
кадрик
Один кадрик на кинопленке или одно статичное изображение в видеозаписи
[Юлия Максимова, http://anjellka.livejournal.com/91779.html]Тематики
Обобщающие термины
- режиссура, операторское мастерство
EN
каркас
Несущая стержневая конструкция, являющаяся остовом здания, сооружения или конструкции
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
EN
DE
FR
каркас держателя пьезоэлектрического резонатора
каркас
Часть держателя пьезоэлектрического резонатора, служащая для крепления пьезоэлемента или пьезоэлектрического вибратора.
[ ГОСТ 18669-73]Тематики
Синонимы
EN
DE
FR
конструкция
Устройство, взаимное расположение частей и состав машины, механизма или сооружения.
[ http://sl3d.ru/o-slovare.html]Параллельные тексты EN-RU
The new valve profile is design to ensure smooth and precise control at low capacities for improved part load performances.
[Lennox]Вентиль новой конструкции обеспечивает плавное и точное регулирование при низкой производительности холодильного контура, что увеличивает его эффективность при неполной нагрузке.
[Интент]
Тематики
EN
коробка
1. Неподвижная часть заполнения проёмов в виде замкнутой или незамкнутой рамы
2. Остов прямоугольного здания с несущими наружными стенами
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
EN
DE
FR
масса (при заземлении)
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]Тематики
- электротехника, основные понятия
EN
наличник
Декоративная планка, обрамляющая дверной или оконный проём
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
наличник
Планки, которые закрывают дефекты соединения между коробом (дверной коробкой) и стеной. Материалы, из которых изготавливаются наличники - это дерево или пластик. Наличники бывают скругленные, фигурные, плоские, телескопические и на шпонке.
[ http://doorss.ru/term.php]
наличник
Деревянные профильные планки, служащие для обрамления дверного проёма и для прикрытия щелей между коробкой и стеной. Наличники бывают плоские, скруглённые, фигурные, телескопические и на шпонке. Различны также их размеры и материалы отделки и изготовления.
[ http://na-dveri.ru/polezno-znati/termini-i-opredeleniya.html]Тематики
EN
DE
FR
оправа защитных очков
оправа
Совокупность конструктивных элементов открытых защитных очков для удержания очковых стекол в требуемом при эксплуатации положении.
[ ГОСТ 12.4.001-80]Тематики
Синонимы
EN
DE
рама
Стержневая система, стержни которой во всех или в некоторых узлах жестко соединены между собой.
[ http://www.isopromat.ru/sopromat/terms]Тематики
- строительная механика, сопротивление материалов
EN
рама
Деталь конструкции саней. Рама, как правило, изготавливается из легкого металла.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]EN
frame
Constructive part of a sled. The frame is usually made of a lightweight metal.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]Тематики
- санный спорт, бобслей, скелетон
EN
рама
Стержневая система, стержни которой во всех или в некоторых узлах жестко соединены между собой.
Примечание. По аналогии с фермами различаются «плоские рамы» и «пространственные рамы».
[Сборник рекомендуемых терминов. Выпуск 82. Строительная механика. Академия наук СССР. Комитет научно-технической терминологии. 1970 г.]Тематики
- строительная механика, сопротивление материалов
EN
DE
FR
рама кресла-коляски
Узел, служащий для соединения и размещения составных частей кресла-коляски.
Примечание
Сиденье, спинка, рама и т.д. могут представлять собой единое целое или состоять из нескольких частей.
[ ГОСТ Р 50653-94 ИСО 6440-85]Тематики
Обобщающие термины
EN
FR
рамка
Ндп. ободок
Фиксируемая часть замка, закрепляемая на обеих смыкаемых сторонах кожгалантерейного изделия.
[ ГОСТ 15470-70]Недопустимые, нерекомендуемые
Тематики
Обобщающие термины
EN
DE
FR
фрейм
Кадр данных, обычно фиксированного формата
[ ГОСТ Р 52872-2007]
фрейм
Фрагмент web-страницы, чаще всего являющийся отдельным файлом.
[ http://www.lexikon.ru/rekl/a_eng.html]Тематики
EN
цикл временного объединения цифровых сигналов данных
цикл временного объединения
Совокупность примыкающих друг к другу интервалов времени, отведенных для передачи цифровых сигналов данных, поступающих по нескольким направлениям, в которой каждому из объединяемых по времени сигналов выделен однозначно определяемый интервал времени.
[ ГОСТ 17657-79 ]Тематики
Обобщающие термины
Синонимы
EN
цикл временного объединения цифровых сигналов электросвязи
цикл
Совокупность примыкающих друг к другу интервалов времени, отведенных для передачи цифровых сигналов электросвязи, поступающих от различных источников, в которой каждому из этих сигналов выделен определенный интервал времени, положение которого может быть определено однозначно.
[ ГОСТ 22670-77]Тематики
Синонимы
EN
шпангоут судна
шпангоут
Поперечная балка бортового перекрытия судна или ее продолжение по днищевому перекрытию на судах внутреннего плавания, катерах, яхтах.
Поперечный разрез сухогрузного судна
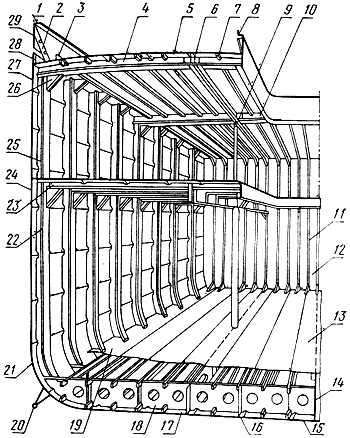
1 - планширь судна; 2 - стойка фальшборта; 3 - полоса ватервейса судна; 4 - рамный бимс; 5 - настил палубы судна; 6 - карлингс; 7 - продольная подпалубная балка судна; 8 - комингс люка судна; 9 - пиллеро судна; 10 - концевой бимс; 11 - стойка переборки судна; 12 - непроницаемая переборка корпуса судна; 13 - настил второго дна судна; 14 - вертикальный киль судна; 15 - горизонтальный киль судна; 16 - днищевой стрингер судна; 17 - наружная днищевая обшивка судна; 18 - флор; 19 - крайний междудонный лист судна; 20 - скуловой киль судна; 21 - скуловой пояс наружной обшивки судна; 22 - трюмный шпангоут судна; 23 - бимс; 24 - бортовая наружная обшивка судна; 25 - твиндечный шпангоут судна; 26 - бимсовая кница; 27 - ширстрек; 28 - стрингерный угольник судна; 29 - фальшборт
Поперечный разрез нефтеналивного судна
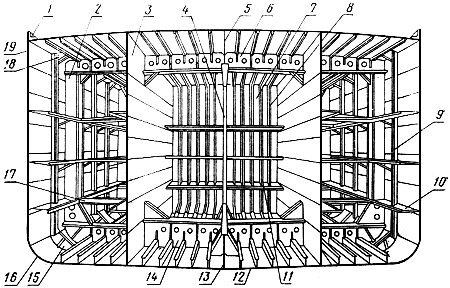
1 - стрингерный угольник судна; 2 - рамный шпангоут судна; 3 - продольная переборка корпуса судна; 4 - доковая стойка переборки судна; 5 - карлингс; 6 - рамный бимс; 7 - поперечная переборка корпуса судна; 8 - стойка переборки судна; 9 - шпангоут судна; 10 - бортовой стрингер судна; 11 - горизонтальная рама переборки судна; 12 - горизонтальный киль судна; 13 - вертикальный киль судна; 14 - флор; 15 - скуловая кница судна; 16 - скуловой пояс наружной обшивки судна; 17 - распорка корпуса судна; 18 - продольная подпалубная балка судна; 19 - ширстрек
[ ГОСТ 13641-80]Тематики
Обобщающие термины
- наружная обшивка, второе дно, подкрепляющие их части
Синонимы
EN
(эквипотенциальная) рама
-
[IEV number 151-13-07]EN
(equipotential) frame
conductive part of an equipment or installation the electric potential of which is taken as a reference
NOTE – In many cases, a chassis made of conductive material may be used as an equipotential frame.
[IEV number 151-13-07]FR
masse (électrique), f
châssis (équipotentiel), m
partie conductrice d'un équipement ou d'une installation, dont le potentiel électrique est pris comme référence
NOTE – Dans de nombreux cas, un châssis réalisé en matériau conducteur peut être utilisé comme masse électrique.
[IEV number 151-13-07]Синонимы
EN
DE
FR
- châssis équipotentiel, m
- châssis, m
- masse électrique, f
- masse, f
108. Цикл временного объединения цифровых сигналов электросвязи
Цикл
Frame
Совокупность примыкающих друг к другу интервалов времени, отведенных для передачи цифровых сигналов электросвязи, поступающих от различных источников, в которой каждому из этих сигналов выделен определенный интервал времени, положение которого может быть определено однозначно
Источник: ГОСТ 22670-77: Сеть связи цифровая интегральная. Термины и определения оригинал документа
13. Кадр средства отображения информации
Кадр
Frame
Сформированное изображение для одновременного отображения информации на экране средства отображения информации
Источник: ГОСТ 27833-88: Средства отображения информации. Термины и определения оригинал документа
68. Кадр данных
Кадр
Frame
Протокольный блок данных уровня звена данных
Источник: ГОСТ 24402-88: Телеобработка данных и вычислительные сети. Термины и определения оригинал документа
3.28 рама (frame): Сборная конструкция сварного или другого типа, на которой установлен шкаф водородного генератора, его оборудование и компоненты, обеспечивающая фиксацию местоположения оборудования, устойчивость и надежность установки.
Источник: ГОСТ Р 54110-2010: Водородные генераторы на основе технологий переработки топлива. Часть 1. Безопасность оригинал документа
Оправа
D. Fassung
E. Frame
Совокупность конструктивных элементов открытых защитных очков для удержания очковых стекол в требуемом при эксплуатации положении
Источник: ГОСТ 12.4.001-80: Система стандартов безопасности труда. Очки защитные. Термины и определения оригинал документа
3.3 рама (frame): Рама, обеспечивающая конструктивную опору и воспринимающая нагрузки от массы и внутреннего давления в теплообменнике.
Источник: ГОСТ Р ИСО 15547-1-2009: Нефтяная и газовая промышленность. Пластинчатые теплообменники. Технические требования оригинал документа
Англо-русский словарь нормативно-технической терминологии > frame
-
6 AR
- число Архимеда
- скорость доступа
- сборка и ремонт
- реагирование на аварийную сигнализацию
- промышленная площадка на ТЭС или АЭС
- приреакторный
- поглощающий стержень
- отчёт о результатах проверки
- отношение активаций
- оборудование, расположенное на площадке АЭС
- автоматическое повторное включение
автоматическое повторное включение
АПВ
Коммутационный цикл, при котором выключатель вслед за его отключением автоматически включается через установленный промежуток времени (О - tбт - В).
[ ГОСТ Р 52565-2006]
автоматическое повторное включение
АПВ
Автоматическое включение аварийно отключившегося элемента электрической сети
[ОАО РАО "ЕЭС России" СТО 17330282.27.010.001-2008]
(автоматическое) повторное включение
АПВ
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва]EN
automatic reclosing
automatic reclosing of a circuit-breaker associated with a faulted section of a network after an interval of time which permits that section to recover from a transient fault
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
auto-reclosing
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEC 62271-100, ed. 2.0 (2008-04)]
auto-reclosing (of a mechanical switching device)
the operating sequence of a mechanical switching device whereby, following its opening, it closes automatically after a predetermined time
[IEV number 441-16-10]FR
réenclenchement automatique
refermeture du disjoncteur associé à une fraction de réseau affectée d'un défaut, par un dispositif automatique après un intervalle de temps permettant la disparition d'un défaut fugitif
[IEC 61936-1, ed. 1.0 (2002-10)]
[IEV 604-02-32]
refermeture automatique
séquence de manoeuvres par laquelle, à la suite d’une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEC 62271-100, ed. 2.0 (2008-04)]
refermeture automatique (d'un appareil mécanique de connexion)
séquence de manoeuvres par laquelle, à la suite d'une ouverture, un appareil mécanique de connexion est refermé automatiquement après un intervalle de temps prédéterminé
[IEV number 441-16-10]
Автоматическое повторное включение (АПВ), быстрое автоматическое обратное включение в работу высоковольтных линий электропередачи и электрооборудования высокого напряжения после их автоматического отключения; одно из наиболее эффективных средств противоаварийной автоматики. Повышает надёжность электроснабжения потребителей и восстанавливает нормальный режим работы электрической системы. Во многих случаях после быстрого отключения участка электрической системы, на котором возникло короткое замыкание в результате кратковременного нарушения изоляции или пробоя воздушного промежутка, при последующей подаче напряжения повторное короткое замыкание не возникает. АПВ выполняется с помощью автоматических устройств, воздействующих на высоковольтные выключатели после их аварийного автоматического отключения от релейной защиты. Многие из этих автоматических устройств обеспечивают АПВ при самопроизвольном отключении выключателей, например при сильных сотрясениях почвы во время близких взрывов, землетрясениях и т. п. Эффективность АПВ тем выше, чем быстрее следует оно за аварийным отключением, т. е. чем меньше время перерыва питания потребителей. Это время зависит от длительности цикла АПВ. В электрических системах применяют однократное АПВ — с одним циклом, двукратное — при неуспешном первом цикле, и трёхкратное — с тремя последовательными циклами. Цикл АПВ — время от момента подачи сигнала на отключение до замыкания цепи главными контактами выключателя — состоит из времени отключения и включения выключателя и времени срабатывания устройства АПВ. Длительность бестоковой паузы, когда потребитель не получает электроэнергию, выбирается такой, чтобы успело произойти восстановление изоляции (деионизация среды) в месте короткого замыкания, привод выключателя после отключения был бы готов к повторному включению, а выключатель к моменту замыкания его главных контактов восстановил способность к отключению поврежденной цепи в случае неуспешного АПВ. Время деионизации зависит от среды, климатических условий и других факторов. Время восстановления отключающей способности выключателя определяется его конструкцией и количеством циклов АПВ., предшествовавших данному. Обычно длительность 1-го цикла не превышает 0,5—1,5 сек, 2-го — от 10 до 15 сек, 3-го — от 60 до 120 сек.
Наиболее распространено однократное АПВ, обеспечивающее на воздушных линиях высокого напряжения (110 кв и выше) до 86 %, а на кабельных линиях (3—10 кв) — до 55 % успешных включений. Двукратное АПВ обеспечивает во втором цикле до 15 % успешных включений. Третий цикл увеличивает число успешных включений всего на 3—5 %. На линиях электропередачи высокого напряжения (от 110 до 500 кВ) применяется однофазовое АПВ; при этом выключатели должны иметь отдельные приводы на каждой фазе.
Применение АПВ экономически выгодно, т. к. стоимость устройств АПВ и их эксплуатации несравнимо меньше ущерба из-за перерыва в подаче электроэнергии.
[ БСЭ]
НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ АПВ
Опыт эксплуатации сетей высокого напряжения показал, что если поврежденную линию электропередачи быстро отключить, т. е. снять с нее напряжение, то в большинстве случаев повреждение ликвидируется. При этом электрическая дуга, возникавшая в месте короткого замыкания (КЗ), не успевает вызвать существенных разрушений оборудования, препятствующих обратному включению линии под напряжение.
Самоустраняющиеся повреждения принято называть неустойчивыми. Такие повреждения возникают в результате грозовых перекрытий изоляции, схлестывания проводов при ветре и сбрасывании гололеда, падения деревьев, задевания проводов движущимися механизмами.
Данные о повреждаемости воздушных линий электропередачи (ВЛ) за многолетний период эксплуатации показывают, что доля неустойчивых повреждений весьма высока и составляет 50—90 %.
При ликвидации аварии оперативный персонал производит обычно опробование линии путем включения ее под напряжение, так как отыскание места повреждения на линии электропередачи путем ее обхода требует длительного времени, а многие повреждения носят неустойчивый характер. Эту операцию называют повторным включением.
Если КЗ самоустранилось, то линия, на которой произошло неустойчивое повреждение, при повторном включении остается в работе. Поэтому повторные включения при неустойчивых повреждениях принято называть успешными.
На ВЛ успешность повторного включения сильно зависит от номинального напряжения линий. На линиях ПО кВ и выше успешность повторного включения значительно выше, чем на ВЛ 6—35 кВ. Высокий процент успешных повторных включений в сетях высокого и сверхвысокого напряжения объясняется быстродействием релейной защиты (как правило, не более 0,1-0,15 с), большим сечением проводов и расстояний между ними, высокой механической прочностью опор. [Овчинников В. В., Автоматическое повторное включение. — М.:Энергоатомиздат, 1986.— 96 с: ил. — (Б-ка электромонтера; Вып. 587). Энергоатомиздат, 1986]
АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ (АПВ)
3.3.2. Устройства АПВ должны предусматриваться для быстрого восстановления питания потребителей или межсистемных и внутрисистемных связей путем автоматического включения выключателей, отключенных устройствами релейной защиты.
Должно предусматриваться автоматическое повторное включение:
1) воздушных и смешанных (кабельно-воздушных) линий всех типов напряжением выше 1 кВ. Отказ от применения АПВ должен быть в каждом отдельном случае обоснован. На кабельных линиях 35 кВ и ниже АПВ рекомендуется применять в случаях, когда оно может быть эффективным в связи со значительной вероятностью повреждений с образованием открытой дуги (например, наличие нескольких промежуточных сборок, питание по одной линии нескольких подстанций), а также с целью исправления неселективного действия защиты. Вопрос о применении АПВ на кабельных линиях 110 кВ и выше должен решаться при проектировании в каждом отдельном случае с учетом конкретных условий;
2) шин электростанций и подстанций (см. 3.3.24 и 3.3.25);
3) трансформаторов (см. 3.3.26);
4) ответственных электродвигателей, отключаемых для обеспечения самозапуска других электродвигателей (см. 3.3.38).
Для осуществления АПВ по п. 1-3 должны также предусматриваться устройства АПВ на обходных, шиносоединительных и секционных выключателях.
Допускается в целях экономии аппаратуры выполнение устройства группового АПВ на линиях, в первую очередь кабельных, и других присоединениях 6-10 кВ. При этом следует учитывать недостатки устройства группового АПВ, например возможность отказа в случае, если после отключения выключателя одного из присоединений отключение выключателя другого присоединения происходит до возврата устройства АПВ в исходное положение.
3.3.3. Устройства АПВ должны быть выполнены так, чтобы они не действовали при:
1) отключении выключателя персоналом дистанционно или при помощи телеуправления;
2) автоматическом отключении от релейной защиты непосредственно после включения персоналом дистанционно или при помощи телеуправления;
3) отключении выключателя защитой от внутренних повреждений трансформаторов и вращающихся машин, устройствами противоаварийной автоматики, а также в других случаях отключений выключателя, когда действие АПВ недопустимо. АПВ после действия АЧР (ЧАПВ) должно выполняться в соответствии с 3.3.81.
Устройства АПВ должны быть выполнены так, чтобы была исключена возможностью многократного включения на КЗ при любой неисправности в схеме устройства.
Устройства АПВ должны выполняться с автоматическим возвратом.
3.3.4. При применении АПВ должно, как правило, предусматриваться ускорение действия релейной защиты на случай неуспешного АПВ. Ускорение действия релейной защиты после неуспешного АПВ выполняется с помощью устройства ускорения после включения выключателя, которое, как правило, должно использоваться и при включении выключателя по другим причинам (от ключа управления, телеуправления или устройства АВР). При ускорении защиты после включения выключателя должны быть приняты меры против возможного отключения выключателя защитой под действием толчка тока при включении из-за неодновременного включения фаз выключателя.
Не следует ускорять защиты после включения выключателя, когда линия уже включена под напряжение другим своим выключателем (т. е. при наличии симметричного напряжения на линии).
Допускается не ускорять после АПВ действие защит линий 35 кВ и ниже, выполненных на переменном оперативном токе, если для этого требуется значительное усложнение защит и время их действия при металлическом КЗ вблизи места установки не превосходит 1,5 с.
3.3.5. Устройства трехфазного АПВ (ТАПВ) должны осуществляться преимущественно с пуском при несоответствии между ранее поданной оперативной командой и отключенным положением выключателя; допускается также пуск устройства АПВ от защиты.
3.3.6. Могут применяться, как правило, устройства ТАПВ однократного или двукратного действия (последнее - если это допустимо по условиям работы выключателя). Устройство ТАПВ двукратного действия рекомендуется принимать для воздушных линий, в особенности для одиночных с односторонним питанием. В сетях 35 кВ и ниже устройства ТАПВ двукратного действия рекомендуется применять в первую очередь для линий, не имеющих резервирования по сети.
В сетях с изолированной или компенсированной нейтралью, как правило, должна применяться блокировка второго цикла АПВ в случае замыкания на землю после АПВ первого цикла (например, по наличию напряжений нулевой последовательности). Выдержка времени ТАПВ во втором цикле должна быть не менее 15-20 с.
3.3.7. Для ускорения восстановления нормального режима работы электропередачи выдержка времени устройства ТАПВ (в особенности для первого цикла АПВ двукратного действия на линиях с односторонним питанием) должна приниматься минимально возможной с учетом времени погасания дуги и деионизации среды в месте повреждения, а также с учетом времени готовности выключателя и его привода к повторному включению.
Выдержка времени устройства ТАПВ на линии с двусторонним питанием должна выбираться также с учетом возможного неодновременного отключения повреждения с обоих концов линии; при этом время действия защит, предназначенных для дальнего резервирования, учитываться не должно. Допускается не учитывать разновременности отключения выключателей по концам линии, когда они отключаются в результате срабатывания высокочастотной защиты.
С целью повышения эффективности ТАПВ однократного действия допускается увеличивать его выдержку времени (по возможности с учетом работы потребителя).
3.3.8. На одиночных линиях 110 кВ и выше с односторонним питанием, для которых допустим в случае неуспешного ТАПВ переход на длительную работу двумя фазами, следует предусматривать ТАПВ двукратного действия на питающем конце линии. Перевод линии на работу двумя фазами может производиться персоналом на месте или при помощи телеуправления.
Для перевода линии после неуспешного АПВ на работу двумя фазами следует предусматривать пофазное управление разъединителями или выключателями на питающем и приемном концах линии.
При переводе линии на длительную работу двумя фазами следует при необходимости принимать меры к уменьшению помех в работе линий связи из-за неполнофазного режима работы линии. С этой целью допускается ограничение мощности, передаваемой по линии в неполнофазном режиме (если это возможно по условиям работы потребителя).
В отдельных случаях при наличии специального обоснования допускается также перерыв в работе линии связи на время неполнофазного режима.
3.3.9. На линиях, отключение которых не приводит к нарушению электрической связи между генерирующими источниками, например на параллельных линиях с односторонним питанием, следует устанавливать устройства ТАПВ без проверки синхронизма.
3.3.10. На одиночных линиях с двусторонним питанием (при отсутствии шунтирующих связей) должен предусматриваться один из следующих видов трехфазного АПВ (или их комбинаций):
а) быстродействующее ТАПВ (БАПВ)
б) несинхронное ТАПВ (НАПВ);
в) ТАПВ с улавливанием синхронизма (ТАПВ УС).
Кроме того, может предусматриваться однофазное АПВ (ОАПВ) в сочетании с различными видами ТАПВ, если выключатели оборудованы пофазным управлением и не нарушается устойчивость параллельной работы частей энергосистемы в цикле ОАПВ.
Выбор видов АПВ производится, исходя из совокупности конкретных условий работы системы и оборудования с учетом указаний 3.3.11-3.3.15.
3.3.11. Быстродействующее АПВ, или БАПВ (одновременное включение с минимальной выдержкой времени с обоих концов), рекомендуется предусматривать на линиях по 3.3.10 для автоматического повторного включения, как правило, при небольшом расхождении угла между векторами ЭДС соединяемых систем. БАПВ может применяться при наличии выключателей, допускающих БАПВ, если после включения обеспечивается сохранение синхронной параллельной работы систем и максимальный электромагнитный момент синхронных генераторов и компенсаторов меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины.
Оценка максимального электромагнитного момента должна производиться для предельно возможного расхождения угла за время БАПВ. Соответственно запуск БАПВ должен производиться лишь при срабатывании быстродействующей защиты, зона действия которой охватывает всю линию. БАПВ должно блокироваться при срабатывании резервных защит и блокироваться или задерживаться при работе УРОВ.
Если для сохранения устойчивости энергосистемы при неуспешном БАПВ требуется большой объем воздействий от противоаварийной автоматики, применение БАПВ не рекомендуется.
3.3.12. Несинхронное АПВ (НАПВ) может применяться на линиях по 3.3.10 (в основном 110-220 кВ), если:
а) максимальный электромагнитный момент синхронных генераторов и компенсаторов, возникающий при несинхронном включении, меньше (с учетом необходимого запаса) электромагнитного момента, возникающего при трехфазном КЗ на выводах машины, при этом в качестве практических критериев оценки допустимости НАПВ принимаются расчетные начальные значения периодических составляющих токов статора при угле включения 180°;
б) максимальный ток через трансформатор (автотрансформатор) при угле включения 180° меньше тока КЗ на его выводах при питании от шин бесконечной мощности;
в) после АПВ обеспечивается достаточно быстрая ресинхронизация; если в результате несинхронного автоматического повторного включения возможно возникновение длительного асинхронного хода, должны применяться специальные мероприятия для его предотвращения или прекращения.
При соблюдении этих условий НАПВ допускается применять также в режиме ремонта на параллельных линиях.
При выполнении НАПВ необходимо принять меры по предотвращению излишнего срабатывания защиты. С этой целью рекомендуется, в частности, осуществлять включение выключателей при НАПВ в определенной последовательности, например выполнением АПВ с одной из сторон линии с контролем наличия напряжения на ней после успешного ТАПВ с противоположной стороны.
3.3.13. АПВ с улавливанием синхронизма может применяться на линиях по 3.3.10 для включения линии при значительных (примерно до 4%) скольжениях и допустимом угле.
Возможно также следующее выполнение АПВ. На конце линии, который должен включаться первым, производится ускоренное ТАПВ (с фиксацией срабатывания быстродействующей защиты, зона действия которой охватывает всю линию) без контроля напряжения на линии (УТАПВ БК) или ТАПВ с контролем отсутствия напряжения на линии (ТАПВ ОН), а на другом ее конце - ТАПВ с улавливанием синхронизма. Последнее производится при условии, что включение первого конца было успешным (это может быть определено, например, при помощи контроля наличия напряжения на линии).
Для улавливания синхронизма могут применяться устройства, построенные по принципу синхронизатора с постоянным углом опережения.
Устройства АПВ следует выполнять так, чтобы имелась возможность изменять очередность включения выключателей по концам линии.
При выполнении устройства АПВ УС необходимо стремиться к обеспечению его действия при возможно большей разности частот. Максимальный допустимый угол включения при применении АПВ УС должен приниматься с учетом условий, указанных в 3.3.12. При применении устройства АПВ УС рекомендуется его использование для включения линии персоналом (полуавтоматическая синхронизация).
3.3.14. На линиях, оборудованных трансформаторами напряжения, для контроля отсутствия напряжения (КОН) и контроля наличия напряжения (КНН) на линии при различных видах ТАПВ рекомендуется использовать органы, реагирующие на линейное (фазное) напряжение и на напряжения обратной и нулевой последовательностей. В некоторых случаях, например на линиях без шунтирующих реакторов, можно не использовать напряжение нулевой последовательности.
3.3.15. Однофазное автоматическое повторное включение (ОАПВ) может применяться только в сетях с большим током замыкания на землю. ОАПВ без автоматического перевода линии на длительный неполнофазный режим при устойчивом повреждении фазы следует применять:
а) на одиночных сильно нагруженных межсистемных или внутрисистемных линиях электропередачи;
б) на сильно нагруженных межсистемных линиях 220 кВ и выше с двумя и более обходными связями при условии, что отключение одной из них может привести к нарушению динамической устойчивости энергосистемы;
в) на межсистемных и внутрисистемных линиях разных классов напряжения, если трехфазное отключение линии высшего напряжения может привести к недопустимой перегрузке линий низшего напряжения с возможностью нарушения устойчивости энергосистемы;
г) на линиях, связывающих с системой крупные блочные электростанции без значительной местной нагрузки;
д) на линиях электропередачи, где осуществление ТАПВ сопряжено со значительным сбросом нагрузки вследствие понижения напряжения.
Устройство ОАПВ должно выполняться так, чтобы при выводе его из работы или исчезновении питания автоматически осуществлялся перевод действия защит линии на отключение трех фаз помимо устройства.
Выбор поврежденных фаз при КЗ на землю должен осуществляться при помощи избирательных органов, которые могут быть также использованы в качестве дополнительной быстродействующей защиты линии в цикле ОАПВ, при ТАПВ, БАПВ и одностороннем включении линии оперативным персоналом.
Выдержка временем ОАПВ должна отстраиваться от времени погасания дуги и деионизации среды в месте однофазного КЗ в неполнофазном режиме с учетом возможности неодновременного срабатывания защиты по концам линии, а также каскадного действия избирательных органов.
3.3.16. На линиях по 3.3.15 ОАПВ должно применяться в сочетании с различными видами ТАПВ. При этом должна быть предусмотрена возможность запрета ТАПВ во всех случаях ОАПВ или только при неуспешном ОАПВ. В зависимости от конкретных условий допускается осуществление ТАПВ после неуспешного ОАПВ. В этих случаях предусматривается действие ТАПВ сначала на одном конце линии с контролем отсутствия напряжения на линии и с увеличенной выдержкой времени.
3.3.17. На одиночных линиях с двусторонним питанием, связывающих систему с электростанцией небольшой мощности, могут применяться ТАПВ с автоматической самосинхронизацией (АПВС) гидрогенераторов для гидроэлектростанций и ТАПВ в сочетании с делительными устройствами - для гидро- и теплоэлектростанций.
3.3.18. На линиях с двусторонним питанием при наличии нескольких обходных связей следует применять:
1) при наличии двух связей, а также при наличии трех связей, если вероятно одновременное длительное отключение двух из этих связей (например, двухцепной линии):
несинхронное АПВ (в основном для линий 110-220 кВ и при соблюдении условий, указанных в 3.3.12, но для случая отключения всех связей);
АПВ с проверкой синхронизма (при невозможности выполнения несинхронного АПВ по причинам, указанным в 3.3.12, но для случая отключения всех связей).
Для ответственных линий при наличии двух связей, а также при наличии трех связей, две из которых - двухцепная линия, при невозможности применения НАПВ по причинам, указанным в 3.3.12, разрешается применять устройства ОАПВ, БАПВ или АПВ УС (см. 3.3.11, 3.3.13, 3.3.15). При этом устройства ОАПВ и БАПВ следует дополнять устройством АПВ с проверкой синхронизма;
2) при наличии четырех и более связей, а также при наличии трех связей, если в последнем случае одновременное длительное отключение двух из этих связей маловероятно (например, если все линии одноцепные), - АПВ без проверки синхронизма.
3.3.19. Устройства АПВ с проверкой синхронизма следует выполнять на одном конце линии с контролем отсутствия напряжения на линии и с контролем наличия синхронизма, на другом конце - только с контролем наличия синхронизма. Схемы устройства АПВ с проверкой синхронизма линии должны выполняться одинаковыми на обоих концах с учетом возможности изменения очередности включения выключателей линии при АПВ.
Рекомендуется использовать устройство АПВ с проверкой синхронизма для проверки синхронизма соединяемых систем при включении линии персоналом.
3.3.20. Допускается совместное применение нескольких видов трехфазного АПВ на линии, например БАПВ и ТАПВ с проверкой синхронизма. Допускается также использовать различные виды устройств АПВ на разных концах линии, например УТАПВ БК (см. 3.3.13) на одном конце линии и ТАПВ с контролем наличия напряжения и синхронизма на другом.
3.3.21. Допускается сочетание ТАПВ с неселективными быстродействующими защитами для исправления неселективного действия последних. В сетях, состоящих из ряда последовательно включенных линий, при применении для них неселективных быстродействующих защит для исправления их действия рекомендуется применять поочередное АПВ; могут также применяться устройства АПВ с ускорением защиты до АПВ или с кратностью действия (не более трех), возрастающей по направлению к источнику питания.
3.3.22. При применении трехфазного однократного АПВ линий, питающих трансформаторы, со стороны высшего напряжения которых устанавливаются короткозамыкатели и отделители, для отключения отделителя в бестоковую паузу время действия устройства АПВ должно быть отстроено от суммарного времени включения короткозамыкателя и отключения отделителя. При применении трехфазного АПВ двукратного действия (см. 3.3.6) время действия АПВ в первом цикле по указанному условию не должно увеличиваться, если отключение отделителя предусматривается в бестоковую паузу второго цикла АПВ.
Для линий, на которые вместо выключателей устанавливаются отделители, отключение отделителей в случае неуспешного АПВ в первом цикле должно производиться в бестоковую паузу второго цикла АПВ.
3.3.23. Если в результате действия АПВ возможно несинхронное включение синхронных компенсаторов или синхронных электродвигателей и если такое включение для них недопустимо, а также для исключения подпитки от этих машин места повреждения следует предусматривать автоматическое отключение этих синхронных машин при исчезновении питания или переводить их в асинхронный режим отключением АГП с последующим автоматическим включением или ресинхронизацией после восстановления напряжения в результате успешного АПВ.
Для подстанций с синхронными компенсаторами или синхронными электродвигателями должны применяться меры, предотвращающие излишние срабатывания АЧР при действии АПВ.
3.3.24. АПВ шин электростанций и подстанций при наличии специальной защиты шин и выключателей, допускающих АПВ, должно выполняться по одному из двух вариантов:
1) автоматическим опробованием (постановка шин под напряжение выключателем от АПВ одного из питающих элементов);
2) автоматической сборкой схемы; при этом первым от устройства АПВ включается один из питающих элементов (например, линия, трансформатор), при успешном включении этого элемента производится последующее, возможно более полное автоматическое восстановление схемы доаварийного режима путем включения других элементов. АПВ шин по этому варианту рекомендуется применять в первую очередь для подстанций без постоянного дежурства персонала.
При выполнении АПВ шин должны применяться меры, исключающие несинхронное включение (если оно является недопустимым).
Должна обеспечиваться достаточная чувствительность защиты шин на случай неуспешного АПВ.
3.3.25. На двухтрансформаторных понижающих подстанциях при раздельной работе трансформаторов, как правило, должны предусматриваться устройства АПВ шин среднего и низшего напряжений в сочетании с устройствами АВР; при внутренних повреждениях трансформаторов должно действовать АВР, при прочих повреждениях - АПВ (см. 3.3.42).
Допускается для двухтрансформаторной подстанции, в нормальном режиме которой предусматривается параллельная работа трансформаторов на шинах данного напряжения, устанавливать дополнительно к устройству АПВ устройство АВР, предназначенное для режима, когда один из трансформаторов выведен в резерв.
3.3.26. Устройствами АПВ должны быть оборудованы все одиночные понижающие трансформаторы мощностью более 1 MB·А на подстанциях энергосистем, имеющие выключатель и максимальную токовую защиту с питающей стороны, когда отключение трансформатора приводит к обесточению электроустановок потребителей. Допускается в отдельных случаях действие АПВ и при отключении трансформатора защитой от внутренних повреждений.
3.3.27. При неуспешном АПВ включаемого первым выключателем элемента, присоединенного двумя или более выключателями, АПВ остальных выключателей этого элемента, как правило, должно запрещаться.
3.3.28. При наличии на подстанции или электростанции выключателей с электромагнитным приводом, если от устройства АПВ могут быть одновременно включены два или более выключателей, для обеспечения необходимого уровня напряжения аккумуляторной батареи при включении и для снижения сечения кабелей цепей питания электромагнитов включения следует, как правило, выполнять АПВ так, чтобы одновременное включение нескольких выключателей было исключено (например, применением на присоединениях АПВ с различными выдержками времени).
Допускается в отдельных случаях (преимущественно при напряжении 110 кВ и большом числе присоединений, оборудованных АПВ) одновременное включение от АПВ двух выключателей.
3.3.29. Действие устройств АПВ должно фиксироваться указательными реле, встроенными в реле указателями срабатывания, счетчиками числа срабатываний или другими устройствами аналогичного назначения.
[ ПУЭ]Тематики
- высоковольтный аппарат, оборудование...
- релейная защита
- электроснабжение в целом
Обобщающие термины
Синонимы
Сопутствующие термины
- АПВ воздушных линий
- АПВ смешанных (кабельно-воздушных) линий
- двукратное АПВ
- неуспешное АПВ
- однократное АПВ
- трехкратное АПВ
- цикл АПВ
EN
- AR
- ARC
- auto-reclosing
- automatic reclosing
- automatic recluse
- autoreclosing
- autoreclosure
- reclose
- reclosing
- reclosure
DE
- automatische Wiedereinschaltung
- Kurzunterbrechung
- selbsttätiges Wiederschließen (eines mechanischen Schaltgerätes)
- Wiedereinschaltung, automatische
FR
оборудование, расположенное на площадке АЭС
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
отчёт о результатах проверки
отчёт о результатах ревизии
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
EN
поглощающий стержень
(системы управления и защиты ядерного реактора)
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
промышленная площадка на ТЭС или АЭС
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
- area
- A
- ar
реагирование на аварийную сигнализацию
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
сборка и ремонт
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
скорость доступа
Скорость доступа представляет собой максимальную скорость передачи данных, при которой данные могут поступать в сеть или извлекаться из сети. Она определяется по скорости канала доступа. Скорость в доступе согласуется на определенный период времени на основании двусторонних соглашений между двумя взаимодействующими сетями. Параметр «скорость в доступе» назначается отдельно для каждого оконечного устройства сигнализации. (МСЭ-Т Х.76).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > AR
-
7 factor
1) фактор2) коэффициент; показатель3) ген4) гормон5) витаминagglutinating factor — агглютинин, фактор агглютинации, агглютинирующий фактор
allogenic effect factor — аллогенный фактор (фактор, высвобождающийся из В-лимфоиитов или макрофагов в смешанной культуре лимфоцитов)
anaphylactogenic factor — анафилактогенный фактор, анафилактоген
angiogenesis factor — ангиогенин, фактор ангиогенеза (фактор, продуцируемый макрофагами при воспалении или гипоксии и стимулирующий васкуляризацию повреждённых тканей)
antigrowth factor — антиростовой фактор, фактор подавления [торможения] роста
antisuppressor factor — контрасупрессорный фактор ( продуцируемый контрасупрессорными T-лимфоцитами)
arming factors — «вооружающие» факторы (T-клеточные факторы, обуславливающие активацию цитотоксических макрофагов или лимфоцитов)
B-cell differentiation factor — фактор дифференцировки B-клеток ( индуктор дифференцировки пре-B-клеток)
B-cell maturation factor — фактор созревания В-клеток, пре-В-клеточный фактор (фактор, переводящий В-клетки из фазы G0 в митотический цикл)
B-cell nuclear factor — В-клеточный ядерный фактор (ядерный белок B-лимфоцитов, связанный с 5'-областъю иммуноглобулиновых генов)
blocking factors — блокирующие факторы (субстанции в сыворотке больных с опухолевыми заболеваниями, подавляющие способность иммунокомпетентных лимфоцитов-киллеров разрушать опухолевые клетки)
blood-coagulation factor — фактор свёртывания крови, коагулирующий фактор
camp factor — фактор лизиса эритроцитов (напр. обработанных токсином)
chemotactic factor — хемотаксический фактор ( моноцитов), хемотаксин
Christmas factor — тромбопластин плазмы, фактор IX
cloning inhibitory factor — фактор, ингибирующий клонирование (растворимый медиатор клеточно-зависимого иммунитета, подавляющий клональный рост клеточных культур)
clumping factor — агглютинин, фактор агглютинации, агглютинирующий фактор
coagulation factor — фактор свёртывания крови, коагулирующий фактор
colony-enhancing factor — колониестимулирующий фактор, КСФ
colony-stimulating factor — колониестимулирующий фактор, КСФ
conglutinogen-activating factor — конглютиногенактивирующий фактор ( сывороточный аналог C3b инактиватора)
corticotropin releasing factor — кортикотропин-рилизинг фактор, кортиколиберин
cytotoxic factor — цитотоксический фактор, цитотоксин
cytotoxicity factor — цитотоксический фактор, цитотоксин
decay-accelerating factor — 1) фактор распада 2) ( комплементзависимый) стимулятор гемолиза, DAF-фактор (белковый регулятор C3/C5-конвертазы)
diluting factor — фактор ослабления, ген-ослабитель (ген-модификатор, ослабляющий действие главных генов)
edema factor — фактор, вызывающий отёк ( один из трёх белковых компонентов экзотоксина Bacillus anthracis)
Ehrlich's serum factors — иммуноглобулины, уст. сывороточные факторы Эрлиха
fibrin-stabilizing factor — фактор XIII, фибринстабилизирующий фактор, фибриназа, фибринолигаза, фактор Лаки-Лорана, фактор Робинса
Fitzgerald factor — фактор Фитцджеральда, фактор Флоджека, фактор XV, фактор Вильямса ( высокомолекулярный кининоген в системе свёртывания крови)
Flaujeac factor — фактор Фитцджеральда, фактор Флоджека, фактор XV, фактор Вильямса ( высокомолекулярный кининоген в системе свёртывания крови)
Fletcher factor — плазменный прекалликреин, фактор Флетчера, фактор XIV
genetically restricted factor — GR-фактор, фактор Эрба (растворимый фактор антигенактивированных макрофагов, представляющий собой комплекс антигена с аутодетерминантами главного комплекса гистосовместимости и способный к индукции сингенных хелперных T-клеток)
glycosylation-enhancing factor — фактор, стимулирующий гликозилирование ( IgE-связывающих рецепторов)
growth factor — фактор роста, ростовой фактор
growth-stimulating factor — фактор роста, ростовой фактор
Hageman factor — фактор XII, контактный фактор, фактор Хагемана
Hanukah's factor — фактор Ханка (сериновая протеаза, ответственная за цитолитическую активность T-лимфоцитов)
helper factor — (вспомогательный) хелперный фактор, хелперный сигнал, T-хелперный фактор
hemolymphopoietic growth factor — гемолимфопоэтический фактор роста; фактор дифференцировки В-клеток ( индуктор дифференцировки пре-B-клеток)
histamine-releasing factor — гистамин-рилизинг фактор, гистаминоген
histamine sensitization factor — гистаминоген, гистамин-рилизинг фактор
homologous restriction factor — гомологичный фактор рестрикции (мембранный белок лимфоцитов, участвующий в процессе формирования мембраноатакующим комплексом комплемента особых каналов в плазмалемме клетки-мишени и предохраняющий аутологичный лимфоцит-киллер от аутолиза)
IgE-binding factor — рецептор, связывающий иммуноглобулины Е
immunomodulating factor — иммуномодулятор, иммуномодулирующий фактор
inflammatory factor — фактор [медиатор] аллергического воспаления (напр. гистамин); кожно-сенсибилизирующий агент
inhibiting factor — ингибитор, ингибирующий фактор
inhibition factor — ингибитор, ингибирующий фактор
inhibitory factor — ингибитор, ингибирующий фактор
initiation factor — фактор [сигнал] инициации (напр. транскрипции)
Laki-Lorand factor — фактор Лаки-Лорана, фактор XIII, фибринстабилизирующий фактор, фибриназа, фибринолигаза, фактор Робинса
Lawrence factor — фактор переноса, трансферный фактор, фактор Лоуренса
lethal factor — фактор летальности ( один из трёх белковых компонентов экзотоксина Bacillus anthracis)
leukokinesis-enhancing factor — фактор, усиливающий хемотаксис лейкоцитов
lymphocyte colony inhibitory factor — фактор, подавляющий колониеобразование лимфоцитов
macrophage fusion factor — фактор [индуктор] слияния макрофагов
macrophage recruiting factor — фактор пролиферации макрофагов, макрофагальный рекрут-фактор
macrophage slowing factor — фактор, замедляющий миграцию макрофагов
mast cell growth factor — фактор роста тучных клеток (напр. интерлейкин 3)
multilineage factor — линиенеспецифический [поливалентный] фактор роста
multipotential factor — поливалентный [линиенеспецифический] фактор роста
myelopoietic factor — фактор индукции миелопоэза, миелопоэтин
nephritic factor — (C3-)нефритогенный фактор (комплемент-специфическое антитело IgG-типа в сыворотке больных гломерулонефритом)
neutrophil-immobilizing factor — фактор подавления миграции нейтрофилов, фактор иммобилизации нейтрофилов
neutrophil migration inhibitory factor — фактор подавления миграции нейтрофилов, фактор иммобилизации нейтрофилов
pathway-specific factor — линиеспецифический фактор, фактор линейной дифференцировки
pre-B-cell factor — фактор созревания В-клеток, пре-В-клеточный фактор (фактор, переводящий В-клетки из фазы G0 в митотический цикл)
рге-gel factor — гелеобразующий фактор, коагулоген ( фактор клеточного иммунитета у членистоногих)
proliferation inhibitory factor — фактор, ингибирующий пролиферацию (растворимый медиатор клеточно-зависимого иммунитета, тормозящий пролиферацию клеточных культур)
Prower factor — фактор X, фактор Стюарта
resistance transfer factor — фактор передачи устойчивости, R-фактор
Robbins factor — фактор Робинса, фибринстабилизирующий фактор, фибриназа, фибринолигаза, фактор Лаки-Лорана, фактор XIII
seeding factor — фактор оседания (отношение количества клеток, способных репопулировать селезёнку и образовывать в ней колонии, к общему количеству костномозговых клеток, введённых в организм)
sex-influenced factor — ген, доминантность которого обусловлена полом особи
skin reactive factor — фактор [медиатор] аллергического воспаления (напр. гистамин); кожно-сенсибилизирующий агент
stem cell renewal factor — фактор самоподдержания стволовых клеток (напр. интерлейкин 3)
stimulatory factor — стимулятор, фактор стимуляции
Stuart factor — фактор X, фактор Стюарта
suppressor factor — фактор супрессии ( иммунного ответа), супрессорный фактор
T-cell growth factor — фактор роста T-клеток (напр. интерлейкин 2)
T-cell replacing factor — фактор, замещающий T-клетки
termination factor — фактор [сигнал] терминации (напр. транскрипции)
transfer factor — фактор переноса, трансферный фактор, фактор Лоуренса
trapping factor — фактор миграции, трэппинг-фактор
T-suppressor factor 1 — T-супрессорный фактор 1 (антиген-специфический фактор, продуцируемый супрессорными Т-клетками первого порядка и несущий идиотипические детерминанты и детерминанты I-J субобласти главного комплекса гистосовместимости)
T-suppressor factor 2 — Т-супрессорный фактор 2 (идиотип-специфический фактор, продуцируемый супрессорными Т-клетками второго порядка и активирующий антиген-специфические супрессорные клетки третьего порядка)
tumor autocrine motility factor — аутокринный фактор миграции опухолевых клеток, опухолеспецифический аутоцитокин
Williams factor — фактор Вильямса, фактор Фитцджеральда, фактор Флоджека, фактор XV ( высокомолекулярный кининоген в системе свёртывания крови)
-
8 automatic forging press
кузнечно-прессовый автомат
Кузнечно-прессовая машина со встроен. средствами автоматич. подачи и передачи заготовки и выдачи изделия. На к. п. а. изготовляют изделия из проволоки, прутка, ленты и полосового материала за один или неск. переходов. К к. п. а. относятся холодно- и горячевысадочные, обрезные, резьбонакатные, листоштамповочные, проволочно-гвоздильные и др.прессы. По принципу действия к. п. а. подразделяют на одно- (ползун совершает один рабочий ход за цикл изготовления изделия) и многоударные (неск. рабочих ходов за цикл изготовления изделия), а также на одно- (с одной позицией формообразующего инструмента) и многопозиц. (с неск. позициями). К. п. а. используют, как правило, в массовом произ-ве.
[ http://metaltrade.ru/abc/a.htm]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > automatic forging press
-
9 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
10 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
11 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
12 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
13 securities
ценные бумаги
Документы имущественного содержания, с которыми какое-либо право связано так, что оно без этих документов не может быть ни осуществлено, ни передано другому лицу. Ц.б. в зависимости от выраженных на бумаге прав различаются на: денежные бумаги (облигации, векселя, чеки и т.д.); товарные бумаги, закрепляющие вещные права, чаще всего собственности или право залога на товары (коносаменты, деливери-ордера, складские свидетельства и др.) и бумаги, закрепляющие право участия в какой-либо компании (акции, сертификаты на акции, пользовательские свидетельства и т.д.).
В зависимости от способа легитимации лица в качестве субъекта права различают бумаги на предьявителя (когда собственником бумаги признается лицо, обладающее документом); именные бумаги (содержащие обозначение собственника в тексте документа) и ордерные бумаги (подразумевающие возможность быть переданными другому лицу путем передаточной надписи на оборотной стороне документа - индоссамента). Следует иметь в виду, что для некоторых именных бумаг законодательством предусматривается возможность передачи прав по индоссаменту, то есть упрошенным порядком.
В Плане счетов для обобщения информации о наличии и движении инвестиций в ценные бумаги других предприятий, процентные облигации государственных и местных займов и др. предназначен счет "Долгосрочные финансовые вложения". При этом вложения в ценные бумаги учитываются на счете "Долгосрочные финансовые вложения" в том случае, когда установленный срок погашения их превышает один год. Ценные бумаги приходуются на счете "Долгосрочные финансовые вложения" по покупной стоимости. Если покупная стоимость приобретенных ценных бумаг выше их' номинальной стоимости, то при каждом начислении причитающегося по ним дохода производится списание части разницы между покупной и номинальной стоимостью. При этом делаются записи по дебету счета "Расчеты с разными дебиторами и кредиторами" (на сумму причитающегося к получению по ценным бумагам дохода) и кредиту счетов (на разницу между покупной и номинальной стоимостью) и "Прибыли и убытки" (на разницу между суммами, отнесенными на счета "Расчеты с разными дебиторами и кредиторами" и "Долгосрочные финансовые вложения"). Если покупная стоимость приобретенных предприятием ценных бумаг ниже их номинальной стоимости, то при каждом начислении причитающегося по ним дохода производится доначисление части разницы между покупной и номинальной стоимостью. При этом делаются записи по дебету счетов "Расчеты с разными дебиторами и кредиторами" (на сумму причитающегося к получению по ценным бумагам дохода) и "Долгосрочные финансовые вложения" (на часть разницы между покупной и номинальной стоимостью) и кредиту счета "Прибыли и убытки" (на общую сумму, отнесенную на счета "Расчеты с разными дебиторами и кредиторами" и "Долгосрочные финансовые вложения"). В обоих случаях: часть разницы между покупной и номинальной стоимостью, списываемая (доначисляемая) при каждом начислении причитающегося предприятию дохода по ценным бумагам, определяется исходя из общей суммы разницы и установленной периодичности выплаты доходов по ценным бумагам; к моменту погашения (выкупа) ценных бумаг оценка, в которой они учитываются на счете "Долгосрочные финансовые вложения", должна соответствовать номинальной стоимости. Погашение (выкуп) и продажа ценных бумаг, учитываемых на счете "Долгосрочные финансовые вложения", отражаются по дебету счета "Реализация прочих активов" и кредиту счета "Долгосрочные финансовые вложения". При инвестициях ценных бумаг на срок до года учет производится на счете "Краткосрочные финансовые вложения" аналогично учету на счете "Долгосрочные финансовые вложения".
[ http://www.lexikon.ru/dict/buh/index.html]
ценные бумаги
Документы, подтверждающие право собственности владельца на какое-либо имущество или денежную сумму, которые не могут быть реализованы или переданы другому лицу без предъявления указанного документа. Эти документы выступают как бы заместителями реальных товаров и услуг, вместо них продаются и покупаются на рынке, прежде всего, на фондовых биржах, отражая имущественные, заемные, обязательственные отношения между участниками фондового рынка. Обращаясь на рынке, ценные бумаги, обладают свойствами ликвидности, надежности, доходности. Наконец, имеют собственный курс, то есть цену, которая, обычно постоянно изменяясь в реальном режиме времени, определяется ситуацией на рынке, экономическим положением эмитента бумаги и другими факторами. Цикл жизни ценной бумаги состоит из нескольких этапов: разработка: (эмитент определяет вид будущей бумаги, номинальную цену, объем выпуска, каналы размещения и т.п.), регистрация бумаги на бирже (в ряде случаев – государственная регистрация), размещение на первичном рынке (IPO), перепродажи на вторичных рынках (собственно, обращение ценной бумаги); погашение. Ценные бумаги можно дарить, наследовать, хранить, сдавать в залог и т.д. В рыночной экономике ценные бумаги выполняют целый ряд важных функций. Они выступают одним из регуляторов в системе воспроизводства, обеспечивая перелив капиталав одни отрасли страны и отток капитала из других. Участвуют в мобилизации денежных средств инвесторов: в покупку ценных бумаг вкладывается значительная часть свободного капитала. Наконец, выполняют информационную функцию, помогая инвесторам ориентироваться в ситуации на рынках и принимать инвестиционные решения. См. также Ликвидность ценных бумаг, Доходность ценных бумаг, Курсовая стоимость ценной бумаги, Номинал ценной бумаги.
[ http://slovar-lopatnikov.ru/]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > securities
См. также в других словарях:
Цикл — совокупность процессов в системе периодически повторяющихся движений, при которых объект, подвергающийся изменению в определенной последовательности, вновь приходит в исходное положение. Источник: ГОСТ 2846 … Словарь-справочник терминов нормативно-технической документации
цикл измерений — 3.1.17. цикл измерений: Серия измерений параметра образца, проводимая через определенные временные интервалы (в зависимости от специфики измерительного процесса) в одинаковых условиях с целью проверки измерительного процесса на стабильность. Один … Словарь-справочник терминов нормативно-технической документации
Цикл Стирлинга — Термодинамические циклы … Википедия
Ивановский цикл — ИВАНОВСКИЙ ЦИКЛ, большой цикл юношеской любовной лирики Л. 1830 32, обращенной к Н.Ф. Ивановой (см. Циклы). В изданиях Л. 19 нач. 20 вв. стихи этого цикла публиковались без указания адресата. В 1916 Б. Нейман высказал предположение, что стих.,… … Лермонтовская энциклопедия
Своя игра — Логотип передачи «Своя игра» (2000 е) Жанр Телевикторина Режи … Википедия
ГОСТ Р 50030.5.1-2005: Аппаратура распределения и управления низковольтная. Часть 5. Аппараты и коммутационные элементы цепей управления. Глава 1. Электромеханические аппараты для цепей управления — Терминология ГОСТ Р 50030.5.1 2005: Аппаратура распределения и управления низковольтная. Часть 5. Аппараты и коммутационные элементы цепей управления. Глава 1. Электромеханические аппараты для цепей управления оригинал документа: (обязательное)… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 50304-92: Системы для сопряжения радиоэлектронных средств интерфейсные. Термины и определения — Терминология ГОСТ Р 50304 92: Системы для сопряжения радиоэлектронных средств интерфейсные. Термины и определения оригинал документа: 75 абонент интерфейса: Радиоэлектронное средство, подключенное к интерфейсу для выдачи или приема информации… … Словарь-справочник терминов нормативно-технической документации
ГОСТ 25868-91: Оборудование периферийное систем обработки информации. Термины и определения — Терминология ГОСТ 25868 91: Оборудование периферийное систем обработки информации. Термины и определения оригинал документа: 77 (устройство типа) «колесо»: Колесо, вращающееся вокруг своей оси, предоставляющее значение скалярной величины.… … Словарь-справочник терминов нормативно-технической документации
Свёрточный код — Свёрточный код это корректирующий ошибки код, в котором (a) на каждом такте работы кодера символов входной полубесконечной последовательности преобразуются в символов выходной, и (b) в преобразовании также участвуют предыдущих символов; (c) … Википедия
Синхронный транспортный модуль — Эту статью следует викифицировать. Пожалуйста, оформите её согласно правилам оформления статей … Википедия
Нейронная сеть Хопфилда — Нейронная сеть Хопфилда полносвязная нейронная сеть с симметричной матрицей связей. В процессе работы динамика таких сетей сходится (конвергирует) к одному из положений равновесия. Эти положения равновесия являются локальными минимумами… … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на все языки
со всех языков на английский- Со всех языков на:
- Английский
- С английского на:
- Русский
